Linear motion
Linear motion, also called uniform motion or rectilinear motion, motion in one spatial dimension. According to Newton’s first law (also known as the principle of inertia), a body with no net force acting on it will either remain at rest or continue to move with uniform speed in a straight line, according to its initial condition of motion. In fact, in classical Newtonian mechanics, there is no important distinction between rest and uniform motion in a straight line; they may be regarded as the same state of motion seen by different observers, one moving at the same velocity as the particle, the other moving at constant velocity with respect to the particle. A body in motion may be said to have momentum equal to the product of its mass and its velocity. It also has a kind of energy that is entirely due to its motion, called kinetic energy. The kinetic energy of a body of mass m in motion with velocity v is given by K = (1/2)mv2.
Speed and Velocity
Both speed and velocity tell us how far something is travelling in unit time. As velocity is a vector it must also tell us what direction the object is travelling in.

average velocity v̅ = Δs / Δt
Acceleration
Acceleration tells us how rapidly something is changing velocity – for instance, the change in velocity in unit time.Deceleration is the same thing, but has a negative sign as the velocity if decreasing.
Velocity-time graphs
These are similar to displacement-time graphs, but this time velocity is on the y-axis. Here are the only possibilities that you’ll come across at A-level.
gradient = change in V (or ΔV) / change in t (or Δt) = the acceleration at any time.
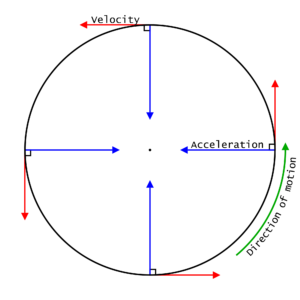
Circular motion
When an object moves in a circle at a constant speed its velocity (which is a vector) is constantly changing. Its velocity is changing not because the magnitude of the velocity is changing but because its direction is. This constantly changing velocity means that the object is accelerating (centripetal acceleration). For this acceleration to happen there must be a resultant force, this force is called the centripetal force.
Angular Speed
The angular speed (w) of an object is the angle (q) it moves through measured in radians (rad) divided by the time (t) taken to move through that angle. This means that the unit for angular speed is the radian per second (rad s-1).

v is the linear velocity measured in metres per second (ms-1).
r is the radius of the circle in metres (m).
f is the frequency of the rotation in hertz (Hz).
Centripetal Acceleration
Centripetal acceleration (a) is measure in metres per second per second (ms-2). It is always directed towards the center of the circle.
Centripetal Force
When an object moves in a circle the centripetal force (F) always acts towards the centre of the circle. The centripetal force, measured in newtons (N) can be different forces in different settings it can be gravity, friction, tension, lift, electrostatic attraction etc.

Vibrationational motion
periodic back-and-forth motion of the particles of an elastic body or medium, commonly resulting when almost any physical system is displaced from its equilibrium condition and allowed to respond to the forces that tend to restore equilibrium.
Vibrations fall into two categories: free and forced. Free vibrations occur when the system is disturbed momentarily and then allowed to move without restraint. A classic example is provided by a weight suspended from a spring. In equilibrium, the system has minimum energy and the weight is at rest. If the weight is pulled down and released, the system will respond by vibrating vertically.
The vibrations of a spring are of a particularly simple kind known as simple harmonic motion (SHM). This occurs whenever the disturbance to the system is countered by a restoring force that is exactly proportional to the degree of disturbance. In this case, the restoring force is the tension or compression in the spring, which (according to Hooke’s law) is proportional to the displacement of the spring. In simple harmonic motion, the periodic oscillations are of the mathematical form called sinusoidal.
Most systems that suffer small disturbances counter them by exerting some form of restoring force. It is frequently a good approximation to suppose that the force is proportional to the disturbance, so that SHM is, in the limiting case of small disturbances, a generic feature of vibrating systems. One characteristic of SHM is that the period of the vibration is independent of its amplitude. Such systems therefore are used in regulating clocks. The oscillation of a pendulum, for instance, approximates SHM if the amplitude is small.
A universal feature of free vibration is damping. All systems are subject to frictional forces, and these steadily sap the energy of the vibrations, causing the amplitude to diminish, usually exponentially. The motion is therefore never precisely sinusoidal. Thus, a swinging pendulum, left undriven, will eventually return to rest at the equilibrium (minimum-energy) position.
Forced vibrations occur if a system is continuously driven by an external agency. A simple example is a child’s swing that is pushed on each downswing. Of special interest are systems undergoing SHM and driven by sinusoidal forcing. This leads to the important phenomenon of resonance. Resonance occurs when the driving frequency approaches the natural frequency of free vibrations. The result is a rapid take-up of energy by the vibrating system, with an attendant growth of the vibration amplitude. Ultimately, the growth in amplitude is limited by the presence of damping, but the response can, in practice, be very great. It is said that soldiers marching across a bridge can set up resonant vibrations sufficient to destroy the structure. Similar folklore exists about opera singers shattering wine glasses.
Electric vibrations play an important role in electronics. A circuit containing both inductance and capacitance can support the electrical equivalent of SHM involving sinusoidal current flow. Resonance occurs if the circuit is driven by alternating current that is matched in frequency to that of the free oscillations of the circuit. This is the principle behind tuning. For example, a radio receiver contains a circuit, the natural frequency of which can be varied. When the frequency matches that of the radio transmitter, resonance occurs and a large alternating current of that frequency develops in the circuit. In this way, resonating circuits can be used to filter out one frequency from a mixture.
In musical instruments, the motion of strings, membranes, and air columns consists of a superposition of SHM’s; in engineering structures, vibrations are a common, though usually undesirable, feature. In many cases, complicated periodic motions can be understood as the superposition of SHM at many different frequencies.